
全球计算机视觉领域瞩目的科研盛会——欧洲计算机视觉国际会议(ECCV)公布论文收录结果,来自中国的创新科技企业Nullmax纽劢,其最新的多相机目标检测研究《SimPB: A Single Model for 2D and 3D Object Detection from Multiple Cameras》获得录用。这项创新研究展示了Nullmax纽劢在自动驾驶视觉感知领域的技术实力。
作为计算机视觉领域的三大盛会之一,ECCV由欧洲计算机视觉协会(ECVA)主办,每两年举办一次,汇聚了全球学术界与工业界的精英力量,是展示最新研究成果、推动技术进步的重要平台。其严格的评审机制确保了每一篇入选论文的含金量,Nullmax纽劢论文的入选,无疑是对其技术创新的权威认可。
在论文《SimPB: A Single Model for 2D and 3D Object Detection from Multiple Cameras》中,Nullmax纽劢提出了一种创新的统一目标检测模型SimPB,该模型以端到端、单阶段的方式,同时实现了透视视图中的2D目标检测与鸟瞰图(BEV)空间中的3D目标检测,并通过自动关联2D与3D检测框,采用循环迭代机制不断优化检测结果。SimPB实现了图像空间与BEV空间检测优势的深度融合,为自动驾驶提供了更进一步的精准感知能力。
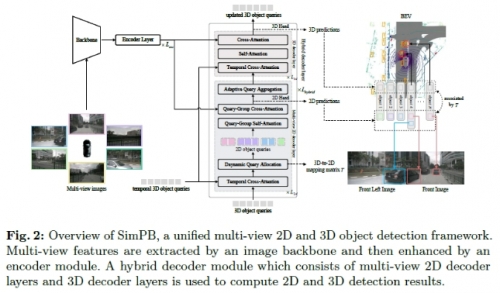
在自动驾驶技术日新月异的今天,精准、全面的环境感知是确保行车安全、提升驾驶体验的关键。Nullmax纽劢的SimPB模型解决了传统方法中2D与3D各自检测的问题,通过创新的算法设计,将两者紧密结合,统一起来,有效提升了自动驾驶系统的整体感知性能。这项成果对于推动高阶智能驾驶功能的普及,以及提升多相机配置下的感知效果具有重要意义。
值得一提的是,今年对于Nullmax纽劢而言是收获满满的一年。除了ECCV 2024的佳绩外,其另一项关于视觉感知的研究《Enhancing 3D Object Detection with 2D Detection-Guided Query Anchors》也成功获得了另一顶会CVPR 2024的认可。这一连串的荣誉不仅彰显了Nullmax纽劢在自动驾驶视觉感知领域的深厚积累与持续创新能力,也为其无人驾驶应用的发展奠定了坚实的基础。
Nullmax纽劢自成立以来致力于以视觉为核心的平台化自动驾驶系统研发,推动前沿技术的突破与应用。随着自动驾驶技术的商业化进程加速推进,Nullmax纽劢继续深耕细作,以更卓越的技术成果为自动驾驶行业贡献力量,技术本色值得赞扬。
(推广)
来源:东方网 | 撰稿:Nullmax | 责编:谷晟 审核:张渊
![]() 新闻投稿:184042016@qq.com 新闻热线:135 8189 2583
新闻投稿:184042016@qq.com 新闻热线:135 8189 2583
中国互联网视听节目服务自律公约 | 网络110报警服务 | 12321垃圾信息举报中心 | 友情链接
版权所有 中国互联网新闻中心 电话: 057187567897 京ICP证 040089号
网络传播视听节目许可证号:0105123 京公网安备110108006329号 京网文[2011]0252-085号

